In diesem Beitrag behandeln wir eine spezielle Form des Elektromotors, den sogenannten Drehstrommotor. Dabei lernst du das Grundprinzip eines Drehstrommotors, wie er aufgebaut ist und welche Rollen die einzelnen Komponenten im Verbund einnehmen. Nachfolgend gehen wir auf den Anschluss eines Drehstrommotors und dessen Funktionsweise ein. Darüber hinaus lernst du, wie die Leistung und der Wirkungsgrad berechnet werden kann und worin sich Synchron- und Asynchronmotoren unterscheiden.
Das alles haben wir für dich auch in einem Video zusammengefasst, sodass du das Wichtigste in Kürze erfahren kannst!
Inhaltsübersicht
Drehstrommotor Grundprinzip
In der Industrie werden meist hohe Leistungen gefordert, die ein Gleichstrommotor nicht erbringen kann. Für diesen Einsatz gibt es den Drehstrommotor. Der Drehstrommotor zeichnet sich darüber hinaus auch durch einen guten Gleichlauf, also eine gleichbleibende Kraftübertragung auf die Welle, aus. Wie ein Elektromotor funktioniert und aufgebaut ist, weißt du bereits aus dem ersten Beitrag dieser Playlist. Der Drehstrommotor ist eine spezielle Bauart des Elektromotors.
Die Spulen für das Statorfeld können dabei entweder in Dreieckschaltung oder Sternschaltung betrieben werden.
Wichtig ist hierbei die Unterscheidung zwischen Drehstrommaschine und Drehstrommotor. Eine Drehstrommaschine kann einerseits die Umwandlung von elektrischer in mechanische Energie gewährleisten, also als Drehstrommotor fungieren. Andererseits kann eine Drehstrommaschine auch als ein Generator eingesetzt werden, welcher mechanische Energie in elektrische Energie umwandelt.
Wie bereits erwähnt, wird der Drehstrommotor mit Dreiphasenwechselstrom betrieben. Der Unterschied zum Gleichstrom ist, dass drei Phasen, also drei Leitungen vorhanden sind, deren Wechselspannung jeweils um 120° gegeneinander verschoben ist. Die Summe der drei Spannungen ist durch die symmetrische Verteilung der Spannungen gleich null.


Der Dreiphasenwechselstrom führt in den drei voneinander getrennten Statorspulen des Drehstrommotors zu einer periodisch wechselnden Spannung. Diese Wicklungen werden meist mit den Buchstaben U, V und W bezeichnet. Sie können entweder in Stern- oder Dreieck- Schaltung an den Drehstrom angeschlossen werden. Die Funktionsweise der Stern- und Dreieck- Schaltung wird in diesem Artikel ebenfalls kurz erläutert.
Das Statorfeld wird durch die Bestromung der drei Statorspulen erzeugt. Betrachtet man das Magnetfeld einer Spule, so wird ersichtlich, dass dessen zeitlicher Ablauf gegenüber den anderen Magnetfeldern um 120° versetzt ist und sinusförmig verläuft. Die Summe des Magnetfelds hat immer dieselbe Stärke und dreht sich mit der Frequenz des Drehstroms. Das Magnetfeld wird auch als Drehfeld bezeichnet.
Wird ein Rotor in Form eines Stabmagneten in dem Drehfeld positioniert, so richtet sich sein Nordpol nach dem Südpol des Drehfelds aus bzw. sein Südpol nach dem Nordpol des Drehfelds. Daraus resultiert die rotatorische Bewegung. Dieses Prinzip ist bei allen Drehstrommotoren gleich, der Unterschied liegt allerdings bei den Drehzahlen. Daher lassen sich Drehstrommotoren in Asynchron- und Synchronmotoren unterscheiden.
Drehstrommotor Aufbau
Um die Funktionsweise eines Drehstrommotors zu verstehen, ist es nützlich den Aufbau des Drehstrommotors mit seinen einzelnen Komponenten zu kennen.
Rotor
Der bewegliche Teil des Drehstrommotors ist der Rotor. Der Rotor wird auch als Anker oder Läufer bezeichnet. Im Allgemeinen besteht der Rotor aus einer beweglichen, rotatorischen Achse und einer Kupfer- oder Aluminiumspule, die um ein Rotorblechpaket gewickelt ist. Der Rotor wird zum Elektromagneten, sobald eine elektrische Spannung angelegt wird. Die Welle ist fest mit dem beweglichen Rotor verbunden und für die Kraftübertragung zuständig. Aufgabe des Rotors, in einem konventionellen Drehstrommotoraufbau, ist die Umwandlung der elektrischen Energie in eine mechanische Bewegung durch die Ausrichtung am Magnetfeld des Stators.
Stator
Beim Drehstrommotor besteht der Stator aus drei Spulen oder einem Vielfachen davon, die von jeweils einer Leiterspannungsphase mit Strom versorgt werden. Der Dreiphasenwechselstrom hat zur Folge, dass die Phasen der drei Spulen um jeweils 120 Grad zueinander verschoben sind. Daraus resultiert ein um ein Drittel verzögertes Magnetfeld in den drei Spulen des Stators, was zu der rotatorischen Bewegung im Rotor führt. Rotor und Stator sind die zwei zentralen Bestandteile eines Drehstrommotor Aufbaus.
Motorgehäuse
Das Motorgehäuse kann je nach Leistung aus unterschiedlichen Materialien gefertigt sein. Bei kleiner, bis mittlerer Leistung wird Aluminiumdruckguss verwendet, wohingegen bei stärkeren Motoren Grauguss herangezogen wird. In das Gehäuse sind oftmals Kühlrippen eingearbeitet, die die Oberfläche des Gehäuses erhöhen. Somit kann die Wärme des Drehstrommotors effizienter abgeleitet werden.
Lagerschilde
Lagerschilde sind die A- und B- seitigen Deckel des Motorgehäuses. Die A- und B- Seite eines Motorgehäuses liegen orthogonal zur Rotorwelle. Sie schützen den Drehstrommotor sowie das Maschineninnere gegen Berührung und sind für die Aufnahme der Rotorwelle verantwortlich. Lagerschilde sind sehr formgenau in das Gehäuse eingearbeitet, um einen gleichmäßigen Luftspalt zwischen Stator und Rotor zu gewährleisten.
Welle
Das Rotorblechpaket ist auf eine Stahlwelle montiert. Die Welle tritt durch die Lagerschilde hindurch. A-seitig tritt die Abtriebswelle durch das Lagerschild und B-seitig betreibt die Welle einen Lüfter oder zusätzliche Systeme wie zum Beispiel eine mechanische Bremse.
Lüfter
Die Welle betreibt B-seitig einen Lüfter. Dieser lenkt durch eine Haube einen Luftstrom, der durch die rotatorische Bewegung erzeugt wird, zurück zu den Kühlrippen des Motorgehäuses.
Lager
Die Aufgabe der Lager, die in den Lagerschilden verbaut sind, ist die Verbindung von rotatorisch beweglichen Teilen und den statischen Komponenten des Drehstrommotorgehäuses.
Studyflix vernetzt: Hier ein Video aus einem anderen Bereich
Nach Beantwortung speichern wir deine Antwort, um Studyflix zu verbessern. Mehr dazu erfährst du in unserer Datenschutzerklärung.
Drehstrommotor Anschluss
Um den Drehstrommotor anzuschließen bestehen grundsätzlich zwei Anschlussarten für die Klemmbrettschaltung: die Sternschaltung und die Dreieckschaltung. Generell lässt sich festhalten: Sind zwei Spannungen auf dem Typenschild des Drehstrommotors gegeben, ist für die höhere Spannung die Sternschaltung und für die geringere Spannung die Dreieckschaltung beim Anschluss zu verwenden.
Sternschaltung
Bei einem Motor mit 230/400V laut Typenschild muss für den Anschluss am Drehstromnetz und bei Betrieb am 400V Netz die Sternschaltung verwendet werden.

Die Sternschaltung wird auch Y-Schaltung genannt, da das Aussehen der Schaltung einem „Y“ ähnelt. An den drei unterschiedlichen Anschluss- bzw. Klemmenpunkten ist jeweils ein Spulenanschluss der drei Spulen an jeweils einen Leiter angeschlossen. Die anderen drei Spulenanschlüsse sind am gemeinsamen Sternpunkt verbunden. Bezeichnet werden die drei Punkte mit den Zahlen 1, 2 und 3 und der Sternpunkt mit 0. Die drei Wicklungsstränge finden sich auf der einen Seite im Sternpunkt zusammen. Die Spannung in Höhe von 230V kann zwischen dem Sternpunkt und der Phase gemessen werden.
Dreieckschaltung
Bei einem Motor mit 400/690V hingegen, muss für den Anschluss, bei Betrieb am 400V Netz, die Dreieckschaltung herangezogen werden.

Die Dreieckschaltung wird auch π-Schaltung genannt. Man sieht hier drei unterschiedliche Punkte bzw. Klemmenpunkte und es liegt weder eine Reihen- noch eine Parallelschaltung vor. Die Widerstände liegen – wie der Name andeuten lässt – im Dreieck zwischen den Punkten 1, 2 und 3. Drehstrommotoren mit 400/690V können dabei entweder direkt oder über eine Stern-Dreieck-Schaltung anlaufen. Letztere wird oft nur bei stärkeren Drehstrommotoren verwendet. Um die Drehrichtung des Rotors eines Drehstrommotors umzukehren, müssen einfach zwei der drei Leiterphasen vertauscht werden.
Drehstrommotor Funktionsweise
Die drei Wicklungen des Stators werden an ein Dreiphasen-Drehstromnetz mit den entsprechenden Spannungen und Frequenzen angeschlossen. Im ersten Kapitel wurde bereits erwähnt, dass die drei Spulen mit sinusförmigen Strömen gleicher Amplituden durchströmt werden. Die Stromamplituden sind in den Spulen um 120 Grad zueinander versetzt. Da die Statorspulen eines Drehstrommotors ebenfalls um 120 Grad versetzt und im Kreis angeordnet sind, wird ein Magnetfeld erzeugt, das mit der Frequenz der angelegten Spannung die Achse des Rotors umläuft. Die Größe des Magnetfeldes bleibt bei Betrieb zwar betragsmäßig gleich, ändert sich aber im Einklang mit der angelegten Frequenz des Drehstromnetzes.
Die Netzspannung in Deutschland hat eine Frequenz von 50 Hz. Der Drehstrom wechselt also 50-mal pro Sekunde seine Periode. Dasselbe geschieht auch mit dem Magnetfeld einer Spule. Die Periodendauer des Statorfelds beträgt damit 20ms.

Das Magnetfeld des Drehstrommotors, auch Drehfeld genannt, induziert in der Spule des Rotors eine elektrische Spannung, womit der Rotor zu einem Elektromagneten wird. Der Rotor richtet sich folglich in Richtung Drehfeld aus, wird auf die Drehzahl des Drehstrommotors beschleunigt und baut in Folge dessen Drehmoment auf. Die Drehzahl des Rotors ist aber nicht immer identisch mit der Drehzahl des Drehfeldes, was unter anderem Frequenzabfällen in der Rotorspule geschuldet ist.
Wie beim Bürstenlosen Gleichstrommotor können beim Drehstrommotor mehrere Spulenpaare verwendet werden.

Die Paare liegen sich gegenüber und sind um den Umfang verteilt. Die Anzahl der Polpaare wird durch die Polpaarzahl p festgelegt. Schaltet man mehrere Spulenpaare für jede Phase hintereinander und gleichmäßig um den Umfang des Stators verteilt, so verändert sich die Drehzahl des Motors. Daraus ergibt sich die Formel für die Leerlaufdrehzahl:
 (
(![[n_o] = min^{-1}](https://blog.assets.studyflix.de/wp-content/ql-cache/quicklatex.com-6685c4eb2a6a6a39fd48c919cfb60dad_l3.png "Rendered by QuickLaTeX.com") )
)
- f = Frequenz
- p = Polpaarzahl

In der Tabelle sind die Leerlaufdrehzahlen für eine Netzfrequenz von 50Hz in abhängig von der Polpaarzahl aufgelistet. Wenn wir die Polpaarzahl erhöhen, können wir also die Drehzahl verändern. Bei niedrigen Drehzahlen ergibt sich ein ruhigerer gleichmäßigerer Lauf bei großen Lasten. Wollen wir die Standarddrehzahl bei einem Drehstrommotor mit p=1 erhöhen, dann geht das nur mit Hilfe eines Getriebes oder der Erhöhung der Frequenz. Da die Netzfrequenz vorgegeben ist, kann die Frequenz also nur mit einem Frequenzumrichter erhöht werden.
Drehstrommotor Leistung und Wirkungsgrad
Die Leistung und der Wirkungsgrad eines Drehstrommotors lässt sich am Besten anhand eines konkreten Beispiels verdeutlichen.
Gegeben sei ein Drehstrommotor, der mit Dreiphasenwechselstrom betrieben wird. Die technischen Daten sind dem Typenschild des Drehstrommotors zu entnehmen:
- 3~Motor
- Leiterspannung: U:
 400V
400V - Leiterstrom I: 19 A
- Abgegebene Leistung an der Welle (Leistungsabgabe): 9 kW
- Wirkfaktor cos
 : 0,8
: 0,8
Neben den zentralen Kennzahlen sind auf dem Typenschild meistens noch die Drehzahl sowie die Frequenz des Drehstroms gegeben.
Mit den Kennzahlen kann nun die Leistungsaufnahme  des Drehstrommotors berechnet werden:
des Drehstrommotors berechnet werden:
 [Watt]
[Watt]
Der Faktor Wurzel 3 muss wegen des Dreiphasenwechselstroms berücksichtigt werden. Im Beispiel ergibt sich also für die zugeführte Leistung:

Die Verlustleistung, also die Energie, die durch Abwärme oder Reibung verloren geht, berechnet sich aus der Differenz zwischen Leistungsaufnahme und Leistungsabgabe. Für den Drehstrommotor im Beispiel ergibt sich:

In diesem Zusammenhang kann auch der Drehstrommotor Wirkungsgrad ermittelt werden.
Wirkungsgrad 
 Prozent
Prozent
Drehstrommotor Arten
Aus dem grundsätzlichen Aufbau eines Drehstrommotors, ergibt sich auch die Unterscheidung in Synchron- und Asynchronmotoren.
Synchronmotor
Der Synchronmotor zeichnet sich dadurch aus, dass der Rotor exakt mit derselben Drehzahl läuft, wie das Magnetfeld der Statorspulen und damit auch synchron mit der Frequenz des Drehstromnetzes. Synchrone Drehstrommotoren können grundsätzlich als Motor, sowie als Drehstrommotor Generator Anwendung finden. Synchronmaschinen können nur durch ein sogenanntes Erregerfeld betrieben werden. Dieses Erregerfeld wird erzeugt, indem auf dem Polrad des Rotors ein Gleichstrom angelegt wird, oder Permanentmagnete verwendet werden. Ohne das Erregerfeld könnte kein Drehmoment auf der Welle aufgebaut werden.
Asynchronmotor
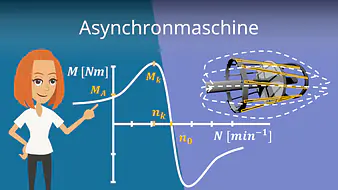
Im Gegensatz zum Synchronmotor, unterscheiden sich die Drehzahlen beim Asynchronmotor. Je weiter sich die Drehzahl des Rotors an die Drehzahl des Drehfeldes annähert, desto stärker sinkt die Frequenz der im Rotor angelegten Spannung. Damit sinkt auch der Strom im Rotorkäfig. Das Resultat sind ein geringeres Drehmoment und geringere Kräfte an der Welle. Dieser Zusammenhang gilt aber nur in der Theorie, da an den Lagern der Welle in der Praxis Kraftverluste zu beobachten sind. Hieraus resultiert ein Unterschied zwischen der Drehzahl des Rotors und der Drehzahl des magnetischen Felds der Statorspulen. Der Drehstrommotor läuft deshalb asynchron. Der Unterschied zwischen Rotordrehzahl und Drehzahl des Drehfeldes ist wichtig für die Funktion des Drehstrommotors. Dieser Unterschied wird auch als Schlupf bezeichnet. Wird der Asynchronmotor als Elektromotor verwendet läuft der Rotor dem Drehfeld nach, wohingegen bei Verwendung des Drehstrommotors als Generator der Rotor dem Drehfeld vorausläuft.
Bauformen
Bei Synchronmotoren kann grundsätzlich zwischen Innen- und Außenpolmaschinen unterschieden werden. Bei Beiden ist jedoch die Erzeugung eines Erregerfelds zentral für die Funktion des Drehstrommotors bzw. Generators. Mithilfe der Statorspule wird im Generatorbetrieb Energie ins Netz gespeist und bei Nutzung als Motor aus dem Netz entnommen. Die räumliche Auslegung des Stators entspricht dem bereits dargelegten Aufbau eines klassischen Drehstrommotors.
Bei einer Innenpolmaschine liegt der Rotor darüber hinaus mittig im Drehfeld des Stators, wo auch das Erregerfeld induziert wird. Dieses Erregerfeld erzeugt Wechselspannungen in den Spulen des Stators. Anwendung findet die Innenpolmaschine zum Beispiel als Generator in Kraftwerken.
Von einer Außenpolmaschine ist jedoch die Rede, wenn sich die Spulen für die Erzeugung des Erregerfeldes am Stator befinden. Die magnetischen Feldlinien, die vom Stator ausgehen, beeinflussen die Spulenwicklungen des Rotors und erzeugen in ihm eine Wechselspannung. Anwendung finden Außenpolmaschinen als Hilfsgeneratoren oder Erregermaschinen.
Asynchronmotoren bestehen ebenfalls grundsätzlich aus den zwei Komponenten Rotor und Stator. Auch für Asynchronmotoren besteht die Konfiguration, dass der Rotor um den Stator läuft. Hierbei lässt sich in zwei Bauformen unterscheiden:
Ist der Rotor als sogenannter Kurzschlussläufer ausgelegt, wird dieser über einen dauerhaft kurzgeschlossenen Käfig, aus massiven Windungen umschlossen. Der Rotor besteht in dieser Modifikation aus einem Eisenblechpaket, in das Metallstäbe (Windungen) aus Nichteisenmetall eingearbeitet sind. Anstatt in den Rotorspulen, wird beim Kurzschlussläufer im Rotorkäfig die elektrische Spannung und damit das Magnetfeld induziert.
Demgegenüber steht die Modifikation, bei der die Rotorwicklung über Schleifringe nach außen geführt ist. Die Wicklungen sind dabei in die Nuten des Rotorblechpakets eingebettet. Diese Bauart wird als Schleifringläufermotor bezeichnet.
Betriebsarten
Die Beanspruchung von elektrischen Maschinen und Motoren lässt sich mit der sogenannten Nennbetriebsart beschreiben. Die Nennbetriebsart gibt Aufschluss über die zumutbare Belastung von Elektromotoren. Im Folgenden sind beispielshaft drei Betriebsarten aufgeführt:
- Dauerbetrieb beschreibt den Betrieb mit einer konstanten Belastung, die solange andauert, bis die Maschine den thermischen Beharrungszustand erreicht. Die genormte Kennzeichnung entspricht dem Kürzel S1.
- Wenn die Dauer der konstanten Belastung nicht ausreicht, um den thermischen Beharrungszustand zu erreichen, spricht man vom Kurzzeitbetrieb S2. Ein Zusatzkriterium ist, dass eine Stillstandszeit folgt, die solange andauern muss, bis die Motorentemperatur sich wieder der Kühlmitteltemperatur auf eine genau definierte Differenz annähert.
- Ein Motorenbetrieb, der sich aus periodisch gleichbleibenden Spielen zusammensetzt, bei denen der Anlauf keinen Einfluss auf die Motorentemperatur hat, wird Periodischer Aussetzbetrieb S3 genannt.
Ein Beispiel wäre die Kennzeichnung S3 – 25 Prozent, bei der der Motor alternierend 2,5 Minuten läuft und danach 7,5 Minuten im Stillstand verharrt.
Schalthäufigkeit
Neben den Nennbetriebsarten gibt es außerdem den Kennwert der Schalthäufigkeit. Dieser gibt Aufschluss darüber, wie oft ein Motor in einer Stunde eingeschaltet werden kann, ohne in einen Zustand der thermischen Überlastung überzugehen. Im Zustand der thermischen Überlastung ist die Funktion des Drehstrommotors gefährdet. Die Schalthäufigkeit ist abhängig von mehreren Parametern. Hierunter fällt beispielsweise die Umgebungstemperatur oder die Zeitspanne des Betriebs.
Drehstrommotor Anwendung
Die Anwendung von Drehstrommotoren ist oft auch davon abhängig, ob eine Konfiguration als Synchronmotor oder als Asynchronmotor vorliegt.
Synchronmotoren sind beispielsweise effizienter und für ihren vergleichsweise hohen Wirkungsgrad bekannt. Dafür besitzen sie in der Regel hohe Anschaffungskosten und eine hohe Wartungsintensität. Deshalb finden Synchronmotoren in hochpreisigen Maschinen Anwendung, beispielsweise in Schiffsantrieben oder industriellen Häckslern.
Asynchronmotoren sind sehr robust und im Vergleich zu Synchronmotoren günstig. Wegen dieser Charakteristika finden Asynchronmotoren auch flächendeckend Anwendung. Man findet Sie in sämtlichen Bereichen der Industrie, wie zum Beispiel in Werkzeugen, Förderbändern, Industrierobotern oder großen Maschinen.
Auch für die Mobilität spielen Elektromotoren und insbesondere Drehstrommotoren eine große Rolle. So werden beispielsweise mehrere Baureihen des ICEs durch Drehstrom-Asynchronmotoren betrieben. In praktisch allen modernen E-Autos werden antriebsseitig auch Drehstrommotoren eingesetzt.
Zusammenfassung
Der Drehstrommotor ist eine spezielle Art des Elektromotors. Er wird mit Dreiphasenstrom betrieben, der eine um 120 Grad zeitlich versetzte Spannung in drei voneinander getrennten Leitern erzeugt. Dadurch werden in den Statorspulen Magnetfelder induziert, die sich zu einem gemeinsamen Magnetfeld summieren, dem sogenannten Drehfeld. Dieses Drehfeld umläuft einen zentral in den Statorspulen liegenden Rotor, der sich am Drehfeld ausrichtet und dadurch auf die Drehzahl des Drehfeldes beschleunigt wird. Eine mit dem Rotor statisch verbundene Welle nimmt diese Drehbewegung auf, womit ein Drehmoment erzeugt wird. Der Drehstrommotor transformiert also elektrische Energie in eine mechanische Bewegung.
Drehstrommotor — häufigste Fragen
(ausklappen)
Drehstrommotor — häufigste Fragen
(ausklappen)-
Was ist der Unterschied zwischen Drehstrommotor und Wechselstrommotor?Ein Drehstrommotor wird mit Drehstrom (drei um 120° phasenverschobene Wechselspannungen) betrieben und erzeugt dadurch ein gleichmäßig rotierendes Magnetfeld im Stator. Ein Wechselstrommotor arbeitet meist mit einphasigem Wechselstrom, wodurch das Magnetfeld nicht von selbst gleichmäßig „mitdreht“ und der Anlauf oft anders gelöst werden muss.
-
Wie funktioniert ein Drehstrom-Asynchronmotor?Ein Drehstrom-Asynchronmotor funktioniert, indem die drei Statorwicklungen ein rotierendes Magnetfeld erzeugen. Dieses Drehfeld induziert im Rotor eine Spannung und dadurch Strom, sodass der Rotor selbst zum Elektromagneten wird und ein Drehmoment entsteht. Asynchron heißt, dass der Rotor dem Drehfeld mit etwas kleinerer Drehzahl nachläuft.
-
Sind 3 Phasen immer Drehstrom?Drehstrom liegt vor, wenn drei Wechselspannungen gleicher Frequenz zeitlich um 120° gegeneinander verschoben sind und zusammen ein Dreiphasensystem bilden. Drei Leitungen oder drei Signale, die man Phasen nennt, sind deshalb nicht automatisch Drehstrom, wenn die Phasenlage oder Symmetrie nicht passt.
-
Was ist der Schlupf beim Motor?Der Schlupf beim Motor ist der Unterschied zwischen der Drehzahl des rotierenden Magnetfelds im Stator und der tatsächlichen Rotordrehzahl. Beim Asynchronmotor läuft der Rotor dem Drehfeld nach, und genau dieser Abstand ist nötig, damit im Rotor Spannung und Strom induziert werden und dadurch Drehmoment entsteht. Unter Last wird der Schlupf größer.
Elektrische Maschinen verstehen
Der Drehstrommotor gehört zu den elektrischen Maschinen und ist ein wichtiger Antrieb in Technik und Industrie. Wer sich mit elektrischen Maschinen beschäftigt, ordnet Motoren und Generatoren ein und vergleicht ihre Aufgaben und Arbeitsweisen. So wird klar, wie elektrische Energie in Bewegung umgewandelt wird und wovon Drehzahl, Drehmoment und Wirkungsgrad abhängen. Im Elektrotechnikbereich findest du passende Videos zu diesem und verwandten Themen.